Sorry, we can not find any courses for this search.
You may want to check Our Hot Courses:
Featured
Free
Free
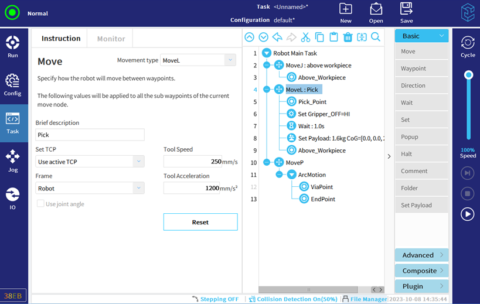
Move_L
What you'll learn
MoveL: Linear movement, which makes the tool center point (TCP) move in a straight line between the waypoints. It allows the user to configure the waypoint or the direction as the subnode. Note that it may not avoid the singularity zone.
When using MoveL, the user can set the tool speed and tool acceleration of the associated waypoint. The unit of the former is mm/s and that of the latter is mm/s2.
Free
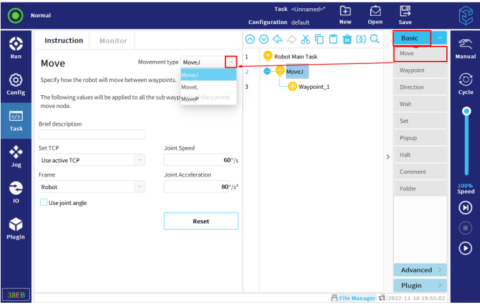
MOVE J
What you'll learn
MoveJ: Joint movement. Move in the space of the robot arm;
Control the joints to complete the movement of the robot. This movement type
provides a curve path for the tool. The common parameters of MoveJ are joint velocity (°/
s) and joint acceleration (°/s2). If the operation needs the robot to move fast between
waypoint, regardless of the movement track of the tool between these waypoints, MoveJ
is the option to choose.
