Free
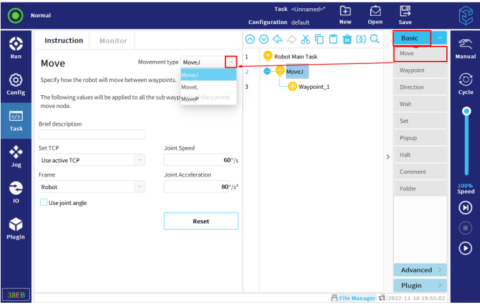
MOVE J
What you'll learn
MoveJ: Joint movement. Move in the space of the robot arm;
Control the joints to complete the movement of the robot. This movement type
provides a curve path for the tool. The common parameters of MoveJ are joint velocity (°/
s) and joint acceleration (°/s2). If the operation needs the robot to move fast between
waypoint, regardless of the movement track of the tool between these waypoints, MoveJ
is the option to choose.
